

De punkter, vi vil diskutere i dette kapitel, er:
Hastighedsnøjagtighed/jævnhed/levetid og vedligeholdelsesevne/støvgenerering/effektivitet/varme/vibration og støj/udstødningsmodforanstaltninger/brugsmiljø
1. Gyrostabilitet og nøjagtighed
Når motoren køres med en konstant hastighed, vil den opretholde en ensartet hastighed i henhold til inertien ved høj hastighed, men den vil variere i henhold til motorens kerneform ved lav hastighed.
For børsteløse motorer med slids vil tiltrækningen mellem de slidsede tænder og rotormagneten pulsere ved lave hastigheder. I tilfældet med vores børsteløse, slidsløse motor er det dog usandsynligt, at der vil opstå ripples, selv ved lave spændinger, da afstanden mellem statorkernen og magneten er konstant i omkredsen (hvilket betyder, at magnetoresistensen er konstant i omkredsen).
2. Levetid, vedligeholdelse og støvgenerering
De vigtigste faktorer ved sammenligning af børstemotorer og børsteløse motorer er levetid, vedligeholdelsesvenlighed og støvgenerering. Fordi børsten og kommutatoren er i kontakt med hinanden, når børstemotoren roterer, vil kontaktdelen uundgåeligt slides på grund af friktion.
Som følge heraf skal hele motoren udskiftes, og støv på grund af slidpartikler bliver et problem. Som navnet antyder, har børsteløse motorer ingen børster, så de har bedre levetid, vedligeholdelsesvenlighed og producerer mindre støv end børstemotorer.
3. Vibrationer og støj
Børstemotorer producerer vibrationer og støj på grund af friktion mellem børsten og kommutatoren, mens børsteløse motorer ikke gør. Slidsede børsteløse motorer producerer vibrationer og støj på grund af slidsmoment, men slidsede motorer og hulkopmotorer gør ikke.
Den tilstand, hvor rotorens rotationsakse afviger fra tyngdepunktet, kaldes ubalance. Når den ubalancerede rotor roterer, genereres der vibrationer og støj, og disse stiger med stigende motorhastighed.
4. Effektivitet og varmeudvikling
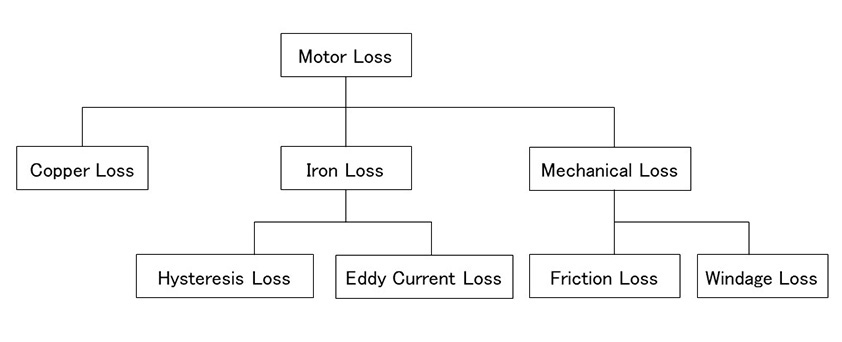
Forholdet mellem den mekaniske udgangsenergi og den elektriske indgangsenergi er motorens virkningsgrad. De fleste tab, der ikke bliver til mekanisk energi, bliver til termisk energi, som opvarmer motoren. Motortab omfatter:
(1). Kobbertab (effekttab på grund af viklingsmodstand)
(2). Jerntab (hysteresetab i statorkernen, hvirvelstrømstab)
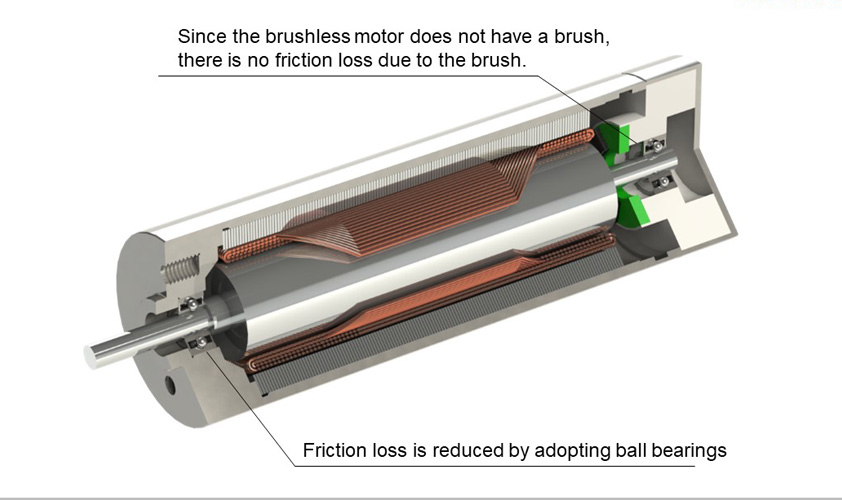
(3) Mekanisk tab (tab forårsaget af friktionsmodstand i lejer og børster, og tab forårsaget af luftmodstand: tab af vindmodstand)
Kobbertab kan reduceres ved at fortykke den emaljerede tråd for at reducere viklingsmodstanden. Men hvis den emaljerede tråd gøres tykkere, vil viklingerne være vanskelige at installere i motoren. Derfor er det nødvendigt at designe viklingsstrukturen, der er egnet til motoren, ved at øge duty cycle-faktoren (forholdet mellem leder og viklingens tværsnitsareal).
Hvis frekvensen af det roterende magnetfelt er højere, vil jerntabet stige, hvilket betyder, at den elektriske maskine med højere rotationshastighed vil generere en masse varme på grund af jerntabet. Ved jerntab kan hvirvelstrømstab reduceres ved at fortynde den laminerede stålplade.
Med hensyn til mekaniske tab har børstemotorer altid mekaniske tab på grund af friktionsmodstanden mellem børsten og kommutatoren, mens børsteløse motorer ikke har det. Med hensyn til lejer er friktionskoefficienten for kuglelejer lavere end for glidelejer, hvilket forbedrer motorens effektivitet. Vores motorer bruger kuglelejer.
Problemet med opvarmning er, at selvom applikationen ikke har nogen grænse for selve varmen, vil den varme, der genereres af motoren, reducere dens ydeevne.
Når viklingen bliver varm, øges modstanden (impedansen), og det er vanskeligt for strømmen at flyde, hvilket resulterer i et fald i drejningsmomentet. Desuden vil magnetens magnetiske kraft blive reduceret på grund af termisk afmagnetisering, når motoren bliver varm. Derfor kan varmeudviklingen ikke ignoreres.
Fordi samarium-koboltmagneter har en mindre termisk afmagnetisering end neodymmagneter på grund af varme, vælges samarium-koboltmagneter i applikationer, hvor motortemperaturen er højere.
Opslagstidspunkt: 21. juli 2023